Brainworks จับมือ ABB และพันธมิตร เสนอโซลูชัน Random Bin Picking ด้วยกล้อง 3 มิติ
Brainworks Imagineering, ABB Automation, ABIZ Technology และ KMT Technology ร่วมกันศึกษาและพัฒนา หุ่นยนต์หยิบชิ้นงานด้วยระบบกล้อง 3 มิติ สินค้ากึ่งสำเร็จรูป ซึ่งเป็นระบบที่พัฒนาขึ้นเพื่อตอบสนองการปรับปรุงประสิทธิภาพการผลิต โดยเฉพาะการหยิบจับสินค้าแบบสุ่ม มุ่งสู่เมคโนโลยีการผลิต ยุค 4.0 พร้อมเปิดตัวสินค้าและสาธิตสินค้าจริงสำหรับ VVIP ในวันที่ 15 มิถุนายน 2565 ที่ผ่านมา

ภายใต้การแข่งขันของอุตสาหกรรมยุคปัจจุบันที่ถูกขับเคลื่อนด้วยหุ่นยนต์และระบบอัตโนมัติ
ความแม่นยำ คุณภาพ และความต่อเนื่องสม่ำเสมอในการผลิตเป็นกุญแจสำคัญในการเอาชนะความท้าทายต่าง
ๆ ที่เกิดขึ้น ไม่ว่าจะเป็นการขาดแคลนแรงงานและทักษะที่เหมาะสม เทรนด์ Mass
Customization
การหยิบชิ้นงานโดยทั่วไป หากใช้มนุษย์จะสามารถปรับตัวเข้ากับ Jig & Fixture ได้ ในขณะที่หุ่นยนต์ไม่อาจปรับการทำงานเหล่านี้ได้ด้วยตัวเอง ต้องมีการตั้งค่าการทำงานที่ละเอียดยิบย่อยตามมา การผลิตแบบ Mass Production ที่มีการเปลี่ยนแปลงน้อยจึงสามารถใช้งานเทคโนโลยีได้อย่างคุ้มค่า ในขณะที่ปัจจุบัน Mass Customization เริ่มขยายตัวมากขึ้น ส่งผลการผลิตมีเกิดการเปลี่ยนแปลงบ่อยตามปริมาณและประเภทสินค้า ทำให้รับบต้องมีการตั้งค่าใหม่ตลอดเวลา ความยืดหยุ่นในการใช้งานและความเร็วในการดำเนินการจึงเป็นตัวแปรสำคัญในการแข่งขัน การผลิตที่ชิ้นงานต้องเปลี่ยนบ่อยการตั้งค่าต่าง ๆ ก็ต้องเกิดขึ้นตาม แต่ด้วยขั้นตอนที่มีรายละเอียดสูงทำให้เทคโนโลยีเดิมที่ใช้กลายเป็นตัวถ่วงในการแข่งขันมากกว่าเป็นเครื่องมือเพื่อก้าวไปสู่เป้าหมายได้ดั่งใจ เพื่อแก้ปัญหาดังกล่าวเทคโนโลยีกล้องจับภาพจึงมีส่วนสำคัญในการสร้างความคล่องตัวภายใต้เงื่อนไขใหม่ในปัจจุบัน

แรกเริ่มการใช้กล้อง 2
มิติ กำหนดแกน X Y ก็สามารถหยิบชิ้นงานได้
แต่ด้วยข้อจำกัดด้านมิติ และผลกระทบที่เกิดขึ้นจากแสงที่สัมผัสสะท้อนชิ้นงาน กล้อง
3 มิติจึงเข้ามามีบทบาทในการแก้ปัญหาที่เกิดขึ้น ด้วยการเพิ่มแกน Z เข้าไปในรูปแบบการตรวจจับภาพหุ่นยนต์จึงสามารถหยิบชิ้นงานแม่นยำมากขึ้น
นำมาซึ่งความสามารถในการหยิบจับชิ้นงานแบบสุ่มโดยไม่ต้องสร้างเงื่อนไขจำนวนมากแบบการใช้งานกล้อง
2 มิติอีกต่อไป ด้วยความสามารถในการปรับเปลี่ยนตามสภาพแวดล้อม เช่น
แสงหรือการสะท้อนที่เกิดขึ้นจากวัสดุ
ทำให้ลดขั้นตอนในการทำงานและลดระยะเวลาที่เกี่ยวข้องได้เป็นอย่างดี
หากพิจารณาความแตกต่างของ Cycle Time ที่เกิดขึ้นก็สามารถเปรียบเทียบได้อย่างชัดเจน
ทำให้โซลูชันใหม่นี้สามารถใช้งานได้อย่างหลากหลาย
โดยเฉพาะอย่างยิ่งการใช้งานในการคัดแยกสินค้าที่มีจำนวน SKU เยอะ
ๆ
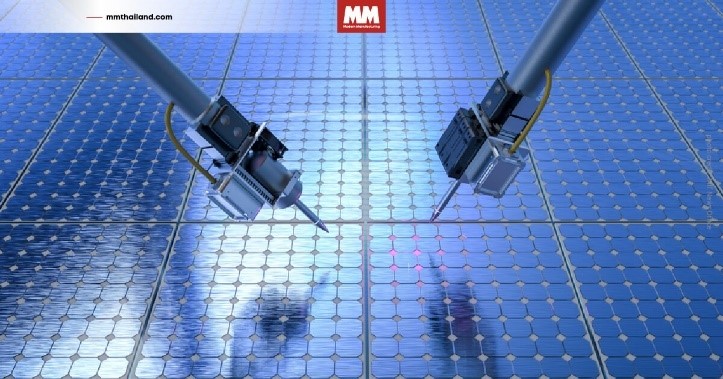
ความสามารถในการหยิบของแบบสุ่ม หรือ Random Bin Picking นั้นสามารถใช้งานได้ในหลากหลายกิจกรรม ไม่ว่าจะเป็นการใช้งานร่วมกับเครื่อง CNC เครื่อง CMM เครื่องฉีดพลาสติก เครื่องพิมพ์ 3 มิติ ฯลฯ ซึ่งภายในงานเปิดตัวนี้ได้จำลองการใช้งานหุ่นยนต์ Cobot กับมือจับและกล้อง 3 มิติ Mech-Eye Deep ที่ใช้การตรวจจับแบบ Structured Light มาพร้อมกับซอฟต์แวร์ที่มี AI สนับสนุนการใช้งานในชื่อ Mech-DLK Deep Learning Software ซึ่งมีจุดเด่นที่ปริมาณชุดข้อมูลที่ใช้ในการเรียนรู้ของระบบนั้นไม่ต้องมีจำนวนมากเท่า Machine Learning แบบดั้งเดิมซึ่งเป็นผลจากความละเอียดของกล้างที่มากขึ้น ทั้งเวลาในการฝึกระบบที่ใช้ก็ไม่นานเพียง 1-2 ชั่วโมงเท่านั้น โดยสามารถฝึกบน PC ได้เลย ไม่จำเป็นต้องใช้สเป็คที่สูงมาก และในส่วนสุดท้าย คือ ซอฟต์แวร์บูรณาการหุ่นยนต์ Mech-Viz Robot Programing Software ที่สามารถปรับแต่งการทำงานในรูปแบบ 3 มิติได้เลย ทำหน้าที่รับคำสั่งจากกล้อง 3 มิติได้เลย ซึ่งปัจจุบันมี Library ของหุ่นยนต์ ABB ครบทุกรุ่นแล้ว

โซลูชันด้านฮาร์ดแวร์ในการควบคุมนั้นใช้เทคโนโลยีจาก SIEMENS ที่รองรับการใช้งานที่หลากหลายยิ่งขึ้นในอนาคต ระบบรองรับการเชื่อมต่อหลักพันและหลักหมื่นได้อย่างสบาย แสดงรายงานและข้อมูลผ่าน Dashboard หรือ Web-based ได้แบบ Real-time การติดตามสถานะต่าง ๆ จึงเป็นเรื่องง่าย ทั้งยังสามารถตั้งค่าแจ้งเตือนได้อย่างง่าย ๆ ไม่ว่าจะเป็น Line หรือ E-mail

โซลูชันนี้ประกอบไปด้วย
หุ่นยนต์ 6 แกน, กล้อง 3 มิติ รวมซอฟต์แวร์และ AI,
มือจับ และ PLC ร่วมกับเทคโนโลยี IIoT ในราคาโปรโมชั่นเหมา ๆ เพียง 1.99 ล้านบาท
มาพร้อมกับการสนับสนุนจากภาครัฐที่สามารถขอชดเชยภาษีได้ 100% และการสนับสนุนอื่น ๆ
ตามนโยบาย BOI อีกด้วย สำหรับใครที่กำลังลังเล
หรือไม่แน่ใจว่าจะใช้งานได้ไหม Brainworks ขอเชิญชวนทุกท่านนำชิ้นงานตัวอย่างมาทดสอบการหยิบจับและการใช้งานจริงได้ที่
Manufacturing Expo 2022 ระหว่างวันที่ 22-25 มิถุนายน 2565
ที่ BITEC บางนาได้เลย
รองรับชิ้นงานทุกขนาดตั้งแต่เล็กไปจนใหญ่ น้ำหนักโหลดสูงสุดถึง 60 กิโลกรัม
พร้อมรับข้อเสนอพิเศษภายในงาน Manufacturing Expo 2022
สำหรับการผ่อน 0% อีกด้วย
เรียกว่านอกจากราคาที่ครอบคลุมต้นทุนที่ไม่เคยมีที่ไหนมาก่อนแล้ว
ยังสามารถทดลองใช้งานกับชิ้นงานได้อีกด้วย ต้องบอกว่าพลาดไม่ได้ด้วยประการทั้งปวง!
ที่มา https://www.mmthailand.com/
วันที่ 4 ก.ค. 2565