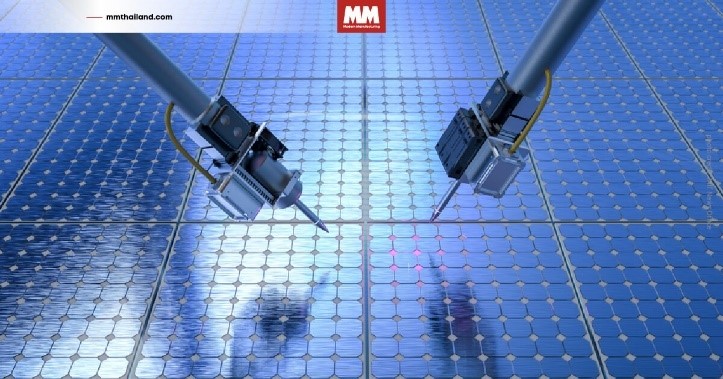
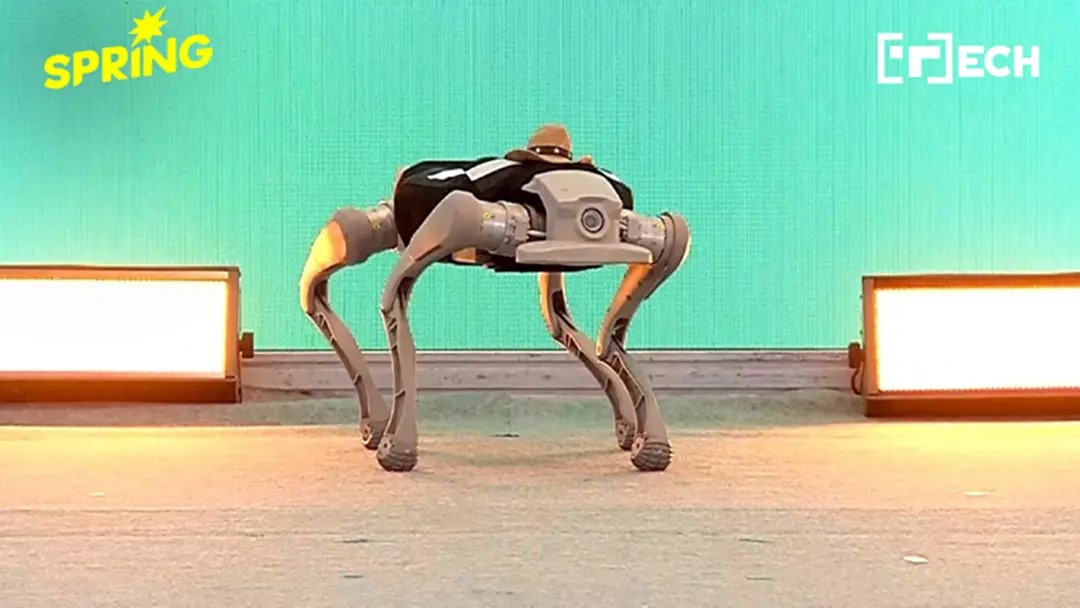
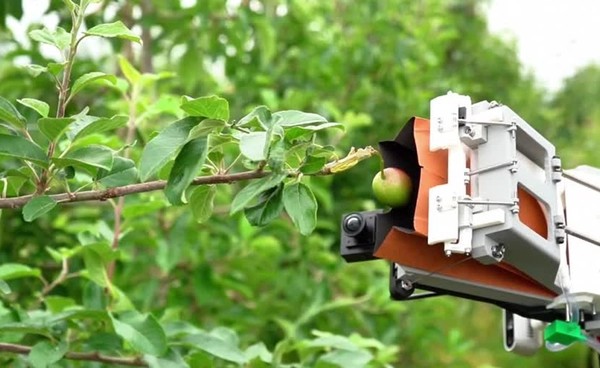
งานวิจัย: หุ่นยนต์สามารถระบุคุณสมบัติวัตถุได้เพียงแค่หยิบเท่านั้น!

นักวิจัยจาก MIT,
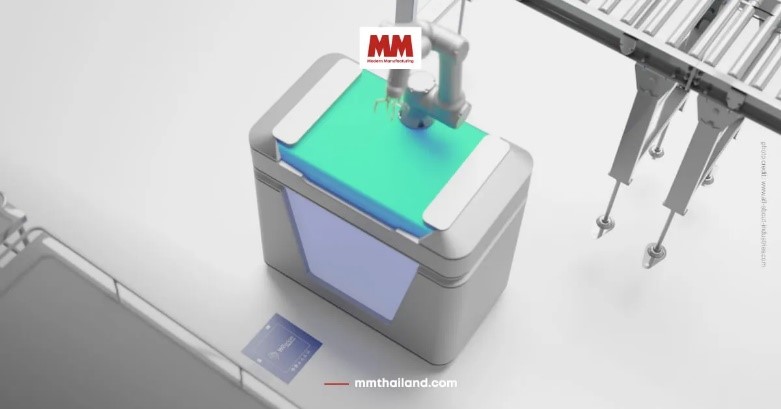
Amazon Robotics และ University of British Columbia ได้ร่วมกันพัฒนาเทคนิคที่ทำให้หุ่นยนต์แค่เขย่ากล่องสินค้าก็จะคาดการคาดการณ์ได้ว่ามีอะไรอยู่ข้างในได้บ้างโดยไม่ต้องเปิดดู
ซึ่งเป็นการใช้เซนเซอร์ภายในหุ่นยนต์เพื่อทำการตรวจวัดน้ำหนัก ความอ่อนนุ่ม
และลักษณะของที่อยู่ภายใน ด้วยการเขย่าเบา ๆ เท่านั้นและจะรู้ผลในเวลาไม่กี่วินาทีเท่านี่น
ซึ่งวิธีการนี้ไม่จำเป็นต้องใช้อุปกรณ์ภายนอกหรือกล้องใด ๆ เพิ่มเติมเลย
เทคนิคที่ถูกพัฒนาขึ้นมานี้มีต้นทุนที่ต่ำ
และมีประโยชน์อย่างมากในกรณีที่การใช้งานกล้องไม่ได้มีประสิทธิภาพมากนัก เช่น
การจัดเรียงวัตถุในชั้นใต้ดินหรือพื้นที่ที่มีแสงน้อย
ไปจนถึงการเคลียร์เศษหินดินปูนหลังจากตึกถล่มเป็นต้น
หัวใจสำคัญของแนวทางนี้ คือ
กระบวนการจำลองที่ทำงานควบคู่กับหุ่นยนต์และวัตถุเพื่อทำการยืนยันคุณลักษณะของวัตถุที่หุ่นยนต์มีปฏิสัมพันธ์ด้วยได้อย่างรวดเร็ว
ด้วยการใช้ข้อมูลที่เกิดขึ้นทำให้สามารถรองรับและคาดการณ์วัตถุได้อย่างหลากหลาย
ต่อยอดเซนเซอร์เดิมในหุ่นยนต์สู่การรับรู้วัตถุที่ปฏิสัมพันธ์ด้วยต้นทุนที่ต่ำ
นักวิจัยใช้วิธีการยกระดับ Proprioception
ซึ่งเป็นการที่มนุษย์หรือหุ่นยนต์สามารถรับรู้การเคลื่อนไหวและตำแหน่งของตัวเองในพื้นที่ได้
ยกตัวอย่างเช่น การที่มนุษย์ยกดัมเบลในยิม
สามารถรับรู้น้ำหนักของดัมเบลผ่านข้อมือและ Bicep แม้ว่าจะถือดัมเบลไปด้วย
ซึ่งหุ่นยนต์สามารถรับรู้น้ำหนักของวัตถุได้ในรูปแบบเดียวกันผ่านข้อต่อทั้งหลายที่อยู่ในแขนกล
ซึ่งความแตกต่างของหุ่นยนต์กับมนุษย์ คือ
หุ่นยนต์สามารถสร้างข้อมูลเป็นตัวเลขที่มีความแม่นยำได้
โดยระหว่างที่หุ่นยนต์ยกวัตถุ
นักวิจัยได้เก็บรวบรวมสัญญาณจากข้อต่อของหุ่นยนต์ซึ่งมีเซนเซอร์คอยตรวจจับตำแหน่งการหมุนและความเร็วอยู่ในระหว่างที่เคลื่อนที่
ข้อต่อหุ่นยนต์ส่วนใหญ่มี Joint
Encoder ภายในมอเตอร์ที่ขับเคลื่อนชิ้นส่วนอยู่แล้ว
นักวิจัยจึงได้นำแนทางนี้มาปรับใช้โดยที่ไม่ต้องใช้อุปกรณ์ภายนอกอย่างกล้องหรือเซนเซอร์แบบ
Tactile เพิ่มเติม
ซึ่งการคาดการณ์คุณสมบัติของวัตถุในระหว่างที่มีปฏิสัมพันธ์กันนั้น ระบบจะใช้ 2
โมเดลในการสนับสนุน โดยโมเดลแรก คือ การจำลองหุ่นยนต์และการเคลื่อนไหว
และอีกโมเดลหนึ่งสำหรับจำลองพลวัตรสำหรับวัตถุ ซึ่งการมี Digital Twin ที่แม่นยำจำช่วยในการทำงานแบบนี้ได้อย่างมาก
โดยอัลกอริทึ่มที่ถูกสร้างขึ้นมาจะจับตาดูการเคลื่อนไหวของหุ่นยนต์และวัตถุระหว่างที่มีปฏิสัมพันธ์ทางกายภาพ
และการใช้ข้อมูล Joint Encoder เพื่อทำงานย้อนหลังและระบุคุณสมบัติของวัตถุ
Differentiable Simulation เมื่อการจำลองเปรียบเทียบกับการทำงานจริงของหุ่นยนต์นำไปสู่การตรวจจับยุคใหม่
นักวิจัยได้ใช้เทคนิคที่เรียกว่า Differentiable
Simulation ที่ทำให้อัลกอริทึมสามารถคาดากรณ์ได้ว่ามีการเปลี่ยนแปลงเล็กน้อยที่เกิดขึ้นกับคุณสมบัติของวัตถุได้อย่างไร
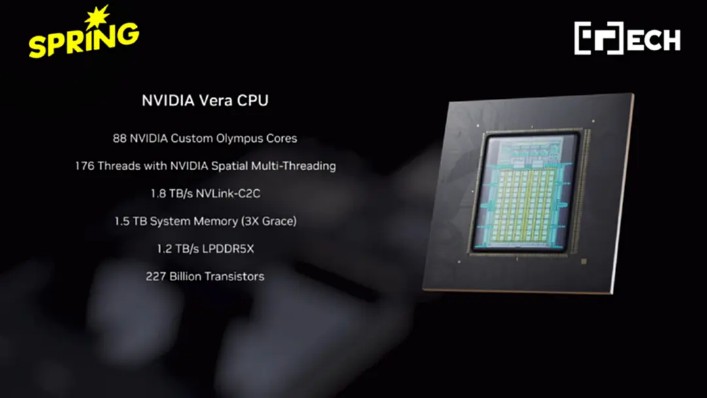
เช่น มวล หรือความนุ่ม ซึ่งจะกระทบกับตำแหน่งข้อสุดท้าย (Ending Joint) ของหุ่นยนต์ นักวิจัยได้สร้างการจำลองของพวกเขาขึ้นมาโดยใช้ Warp
Library ของ NVIDIA ซึ่งเป็น Open-source
มาสนับสนุนการจำลองนี้
เมื่อ Differentiable
Simulation นั้นเข้ากันกับการเคลื่อนไหวจริงของหุ่นยนต์
ระบบจะสามารถระบุคุณสมบัติของวัตดุได้อย่างถูกต้อง
โดยอัลกอริทึมทำงานได้ในระยะเวลาหลักวินาที
และต้องการมองเห็นแนวการเคลื่อนที่ของหุ่นยนต์ในโลกจริงเพื่อคำนวณ
นอกเหนือไปจากการทำให้รู้ถึงมวล
และความอ่อนนุ่มของวัตถุแล้ว
เทคนิคนี้ยังทำให้รู้ถึงความเฉื่อยและความหนืดของของเหลวที่อยู่ภายในได้อีกด้วย
จุดเด่นที่แข็งแรงของเทคนิคนี้ คือ
จะไม่เกิดการทำงานที่ล้มเหลวหากอยู่ภายใต้สภาพแวดล้อมที่มองไม่เห็นหรือต้องเผชิญหน้ากับวัตถุใหม่
ๆ
ในอนาคตนักวิจัยวางแผนที่จะสร้างเทคนิค Multimodal
Sensing โดยผสมผสาน Computer Vision เข้าไป
เพื่อยกระดับการทำงานเดิมที่เกิดขึ้น
และยังต้องการค้นหาทางออกให้กับระบบหุ่นยนต์ที่ซับซ้อนยิ่งขึ้น เช่น หุ่นยนต์นิ่ม
รวมไปถึงวัสดุที่ใกล้เคียงกันคล้ายน้ำ เช่น ของเหลวแบบอื่น ๆ
และวัตถุดิบที่มีลักษณะเป็นเม็ดเล็ก ๆ อย่างทรายเป็นต้น
ที่มา : MMthailand
วันที่ 20 พ.ค. 2568